Hit detector
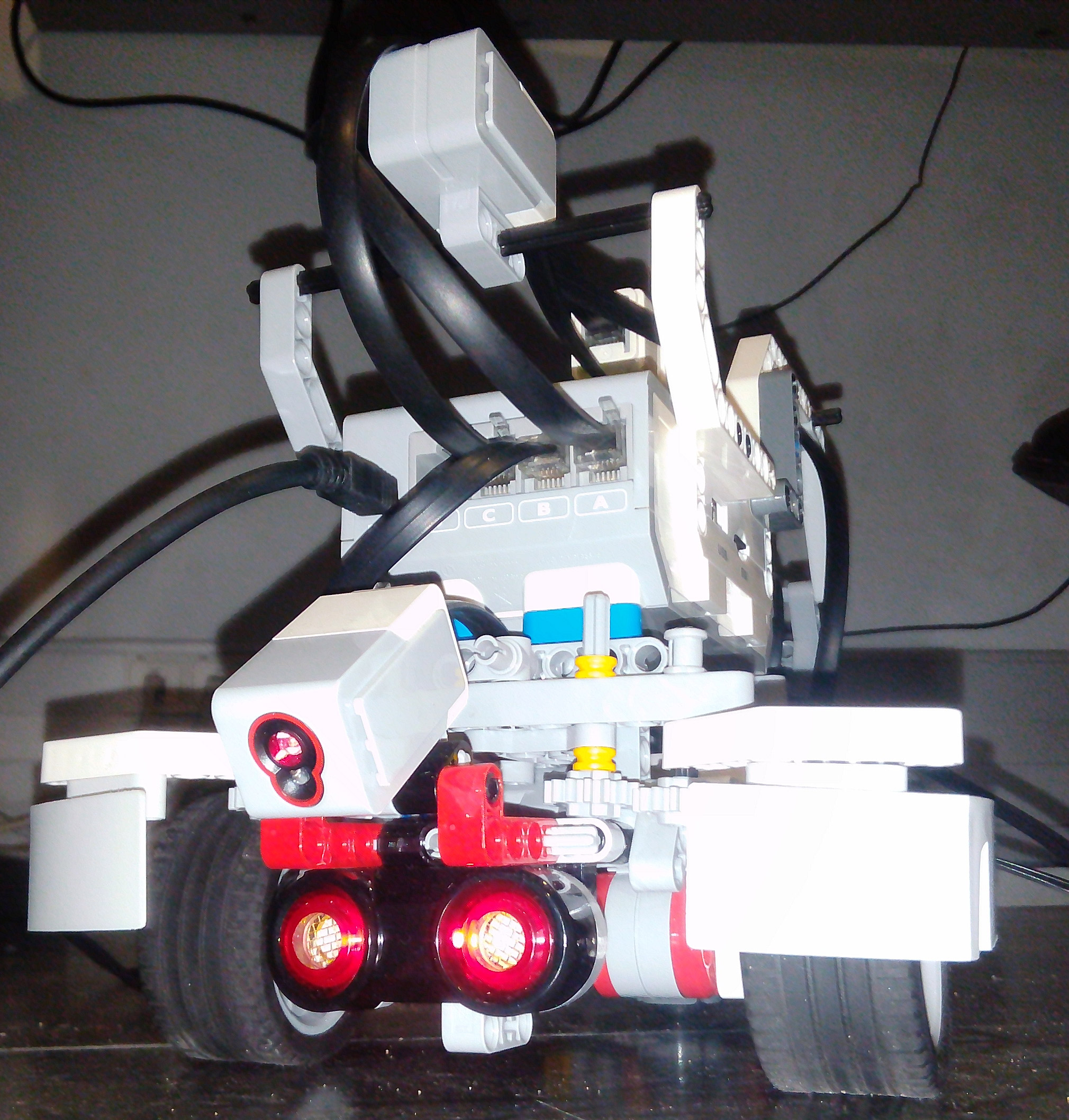
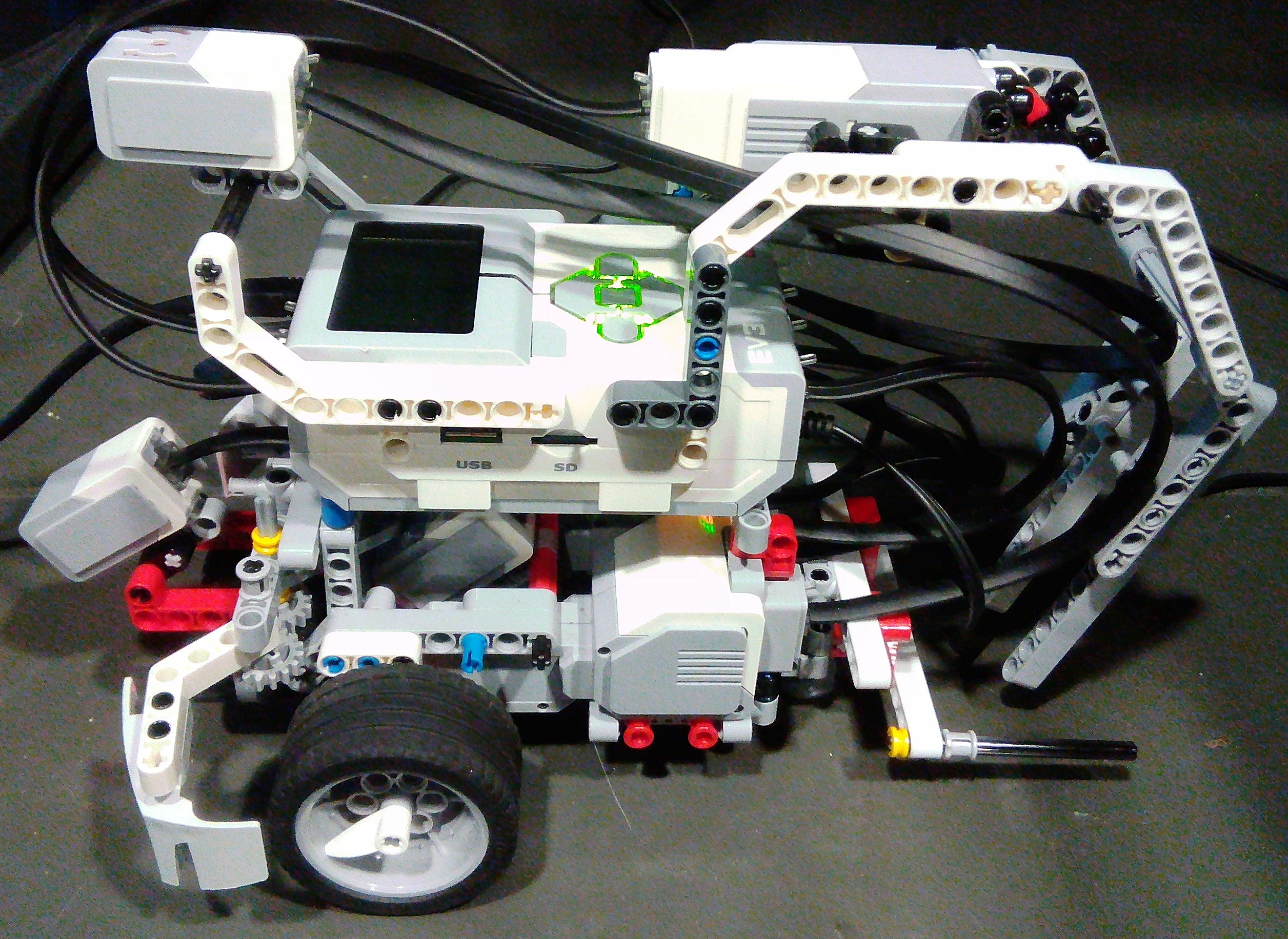
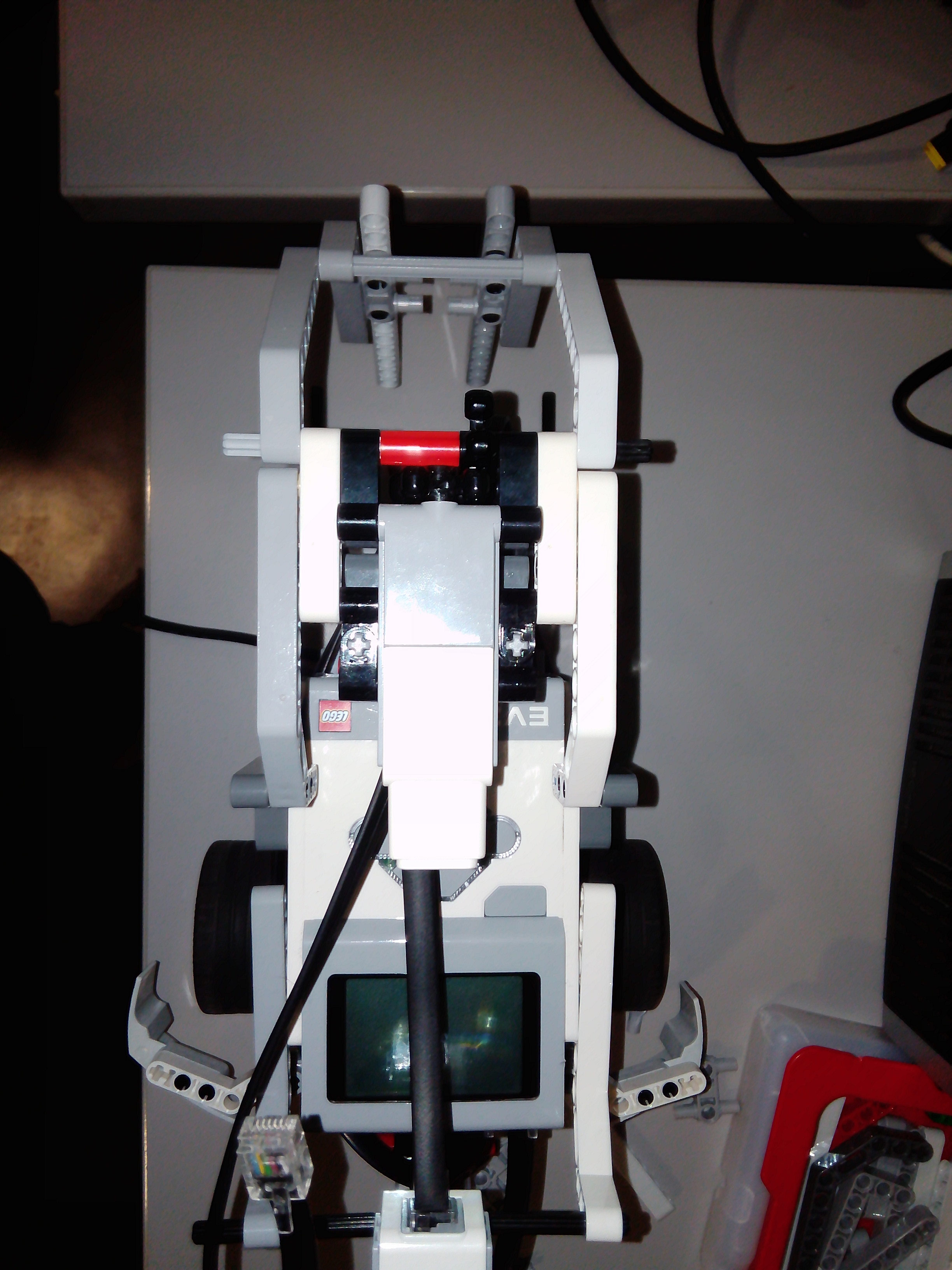
After some tests, we realized our robot was weak on the side: if the obstacle was not exactly in front of him, he could not detect it. We thought about a solution with a push sensor, but we could use only one more sensor.
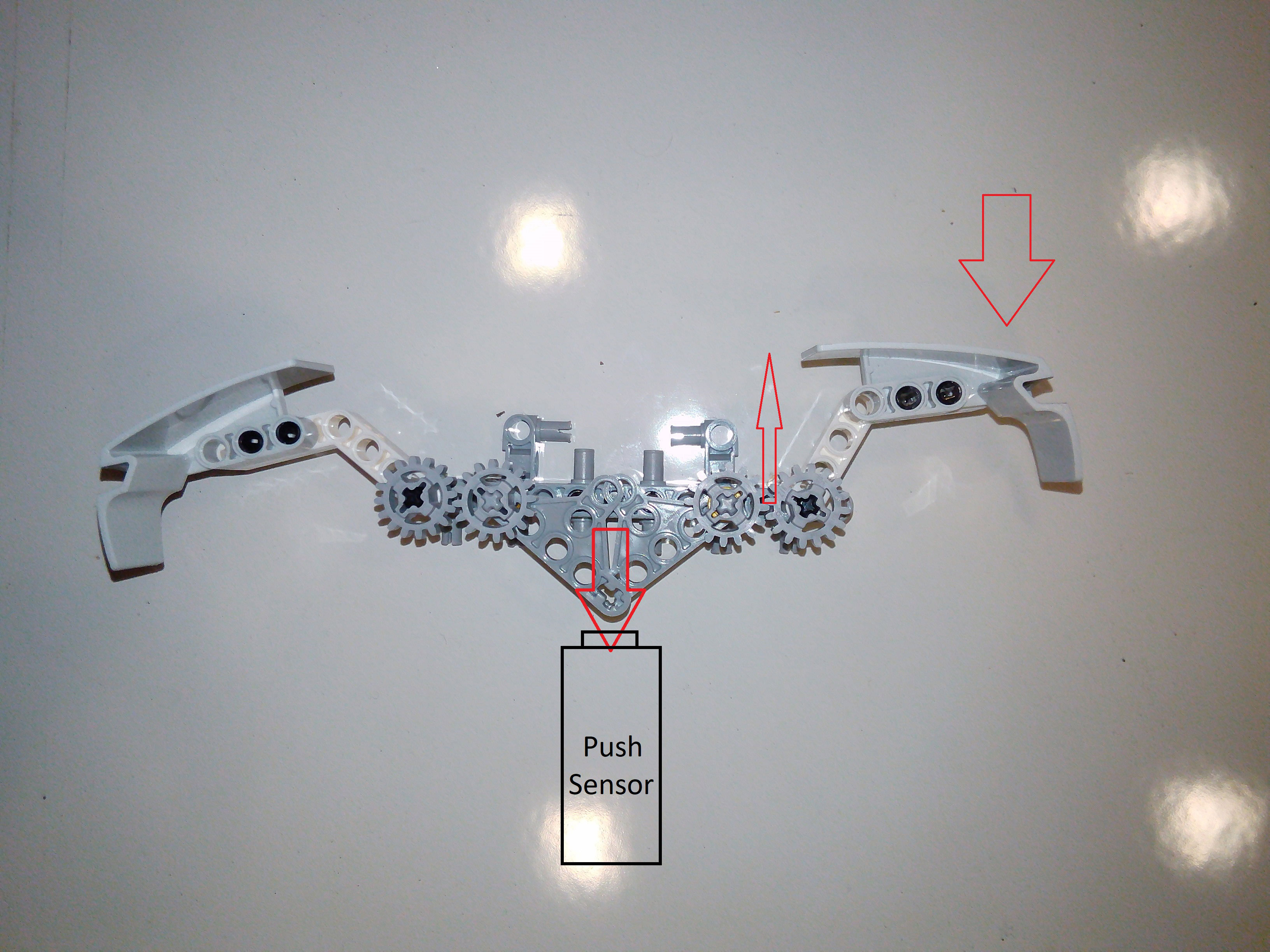
First, we met issues with the sensor getting blocked when not pushed perfectly straight, thus, we came up with a solution involving gears in order to get a good transmission of forces.